
Die Gründer von Kyber Labs, Yonatan Robbins und Tyler Habowski, gaben kürzlich in einem Podcast detaillierte Einblicke in ihre neue, hochleistungsfähige Roboterhand. Diese Entwicklung sorgte bereits vorab für Aufsehen, nachdem ein Video der Hand, die eine Mutter in Rekordzeit dreht, über 100.000 Aufrufe auf X generierte. Die spontane Teilnahme der Gründer an der Sendung bot eine seltene Gelegenheit, die technische Philosophie hinter ihrer Innovation zu verstehen.
Wichtige Erkenntnisse
- Kyber Labs konzentriert sich auf modulare Manipulation statt humanoide Roboter.
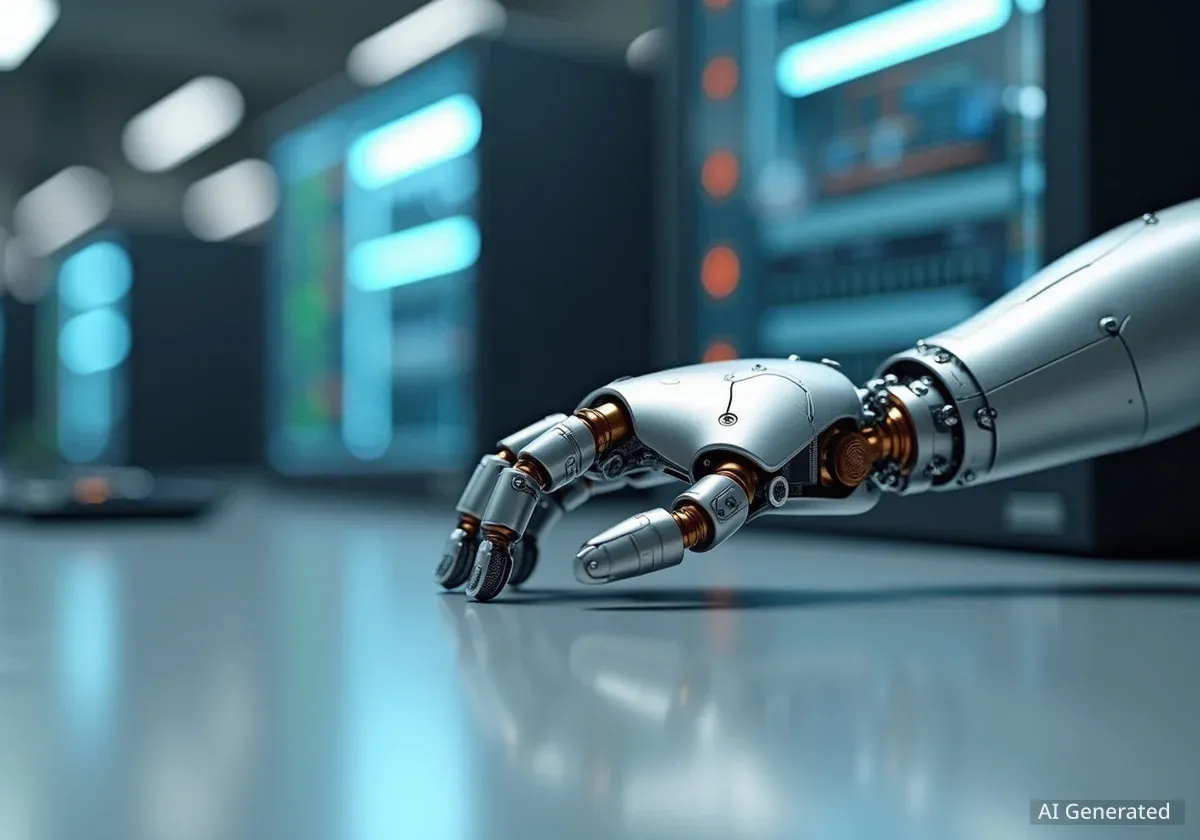
- Die Roboterhand verfügt über 20 Freiheitsgrade und 40 direkte Sehnen.
- Ein innovatives Wärmemanagement im Unterarm verhindert Überhitzung.
- Proprietäre taktile Sensoren sind für zukünftige Versionen geplant.
Ein „Anti-Humanoid“-Ansatz in der Robotik
Ein zentraler Punkt der Diskussion war die strategische Ausrichtung von Kyber Labs. Tyler Habowski beschreibt das Unternehmen als „die Anti-Humanoid-Humanoid-Roboterfirma“. Er betonte, dass die Industrie derzeit zu stark auf allgemeine, gehende Roboter setzt, auch für Aufgaben, die keine Bipedalität erfordern. Habowskis Erfahrung bei SpaceX, wo er an der Wiederverwendbarkeit von Fluggeräten arbeitete, prägt diese Sichtweise.
„Wir versuchen, eine modulare Manipulationsplattform zu bauen“, erklärte Habowski im Gespräch. „Die Software kümmert sich nicht wirklich darum, wie sich die Hand bewegt, sondern nur darum, dass sie den benötigten Punkt im Raum erreichen kann.“
Die These des Unternehmens ist klar: Ein großer Teil der industriellen Automatisierung – insbesondere bei der Bestückung, Montage und Maschinenbedienung – erfordert menschliche Fingerfertigkeit, jedoch keine zweibeinige Form. Ziel ist es, diese Hände auf einfache Arme oder rollende Basen zu montieren, um „langweilige“ Logistikprobleme sofort zu lösen, anstatt auf die Entwicklung eines vollständigen Humanoiden zu warten.
Faktencheck
- Die Roboterhand von Kyber Labs erreicht reflexartige Geschwindigkeiten.
- Das Demonstrationsvideo der Hand hat über 100.000 Aufrufe auf X.
- Das Unternehmen konzentriert sich auf industrielle Anwendungen wie Bestückung und Montage.
20 Freiheitsgrade und direkte Steuerung
Der Podcast klärte auch die Debatte um die interne Architektur der Hand. Analyst Scott Walter und der schwedische Handchirurg Gustav Andersson hatten zuvor versucht, das Design zu entschlüsseln. Habowski bestätigte, dass die Hand 20 Freiheitsgrade (DOF) nutzt, die von 40 vollen Sehnen angetrieben werden. Alle Motoren sind dabei im Unterarm untergebracht. Entscheidend ist, dass das Team auf mechanische Federn oder Unter-Aktuierung (ein Motor steuert mehrere Gelenke) verzichtet hat.
„Wir wollten die vollständige Position der Hand zu jedem Zeitpunkt kennen, um keine Unsicherheit zu haben“, erläuterte Habowski. Durch die direkte Kontrolle jedes Gelenks über Sehnen vermeidet das System die komplexen Steuerungsprobleme, die bei der Verwendung von Federn für Nachgiebigkeit entstehen können.
Das Problem der „heißen Hand“ gelöst
Ein wichtiges Thema war das Wärmemanagement, ein bekannter Schwachpunkt bei vielen geschickten Roboterhänden. Walter wies darauf hin, dass viele Konkurrenzprodukte, die Servos direkt in der Handfläche oder den Fingern platzieren, zwar beeindruckende Geschicklichkeit bieten, aber nach etwa 20 Minuten überhitzen und abgeschaltet werden müssen. Kybers Ansatz basiert auf einer „Shared Heat“-Philosophie.
Durch die Gruppierung der speziell angefertigten, rahmenlosen bürstenlosen Gleichstrommotoren im Unterarm und deren mechanische Verbindung mit einer einzigen Metallstruktur fungiert der Arm als riesiger Kühlkörper. „Man kann die Wärme auf viele Motoren verteilen“, sagte Habowski. „Das ist eine viel effektivere Methode als unabhängige Servos.“ Dies ermöglicht der Hand, in industriellen Umgebungen kontinuierlich zu arbeiten, ohne die thermische Drosselung, die andere geschickte Manipulatoren plagt.
Hintergrundinformationen
Dexteröse Roboterhände sind für viele industrielle Aufgaben entscheidend, insbesondere dort, wo Präzision und schnelle Manipulation gefragt sind. Die Herausforderung besteht oft darin, eine hohe Anzahl von Freiheitsgraden mit ausreichender Kraft, Geschwindigkeit und Ausdauer zu kombinieren, ohne dass die Systeme überhitzen oder zu komplex in der Steuerung werden.
Biomimetik und zukünftige Sensortechnologie
Das Gespräch befasste sich auch mit subtilen biomimetischen Details des Designs. Dr. Gustav Andersson hob die Integration von Fingernägeln am Roboter hervor, ein Merkmal, das im mechatronischen Design oft übersehen wird. Er bemerkte, dass Nägel unerlässlich sind, um eine Gegenkraft zum weichen Fleisch der Fingerspitze zu bieten. Dies ermöglicht das Aufnehmen dünner Objekte wie Nadeln oder Papier.
Während der aktuelle Prototyp Motorströme für die „Propriozeption“ (Berührungserkennung über Widerstand) nutzt, enthüllten die Gründer, dass sie einen proprietären taktilen Sensor entwickelt haben. Dieser Sensor soll in der nächsten Iteration der Hand zum Einsatz kommen und die haptische Rückmeldung erheblich verbessern.
Die vollständige Sendung bot weitere spannende Einblicke, darunter Diskussionen über die Resilienz der Lieferkette, das „Fermi-Paradoxon“ der Roboterhände und Kybers Plan, 50 Hände kostenlos an Forscher zu verteilen, um die Branche zu „beseelen“. Solche Initiativen sind entscheidend, um Innovationen voranzutreiben und die Entwicklung in der Robotik zu beschleunigen.



